
Products

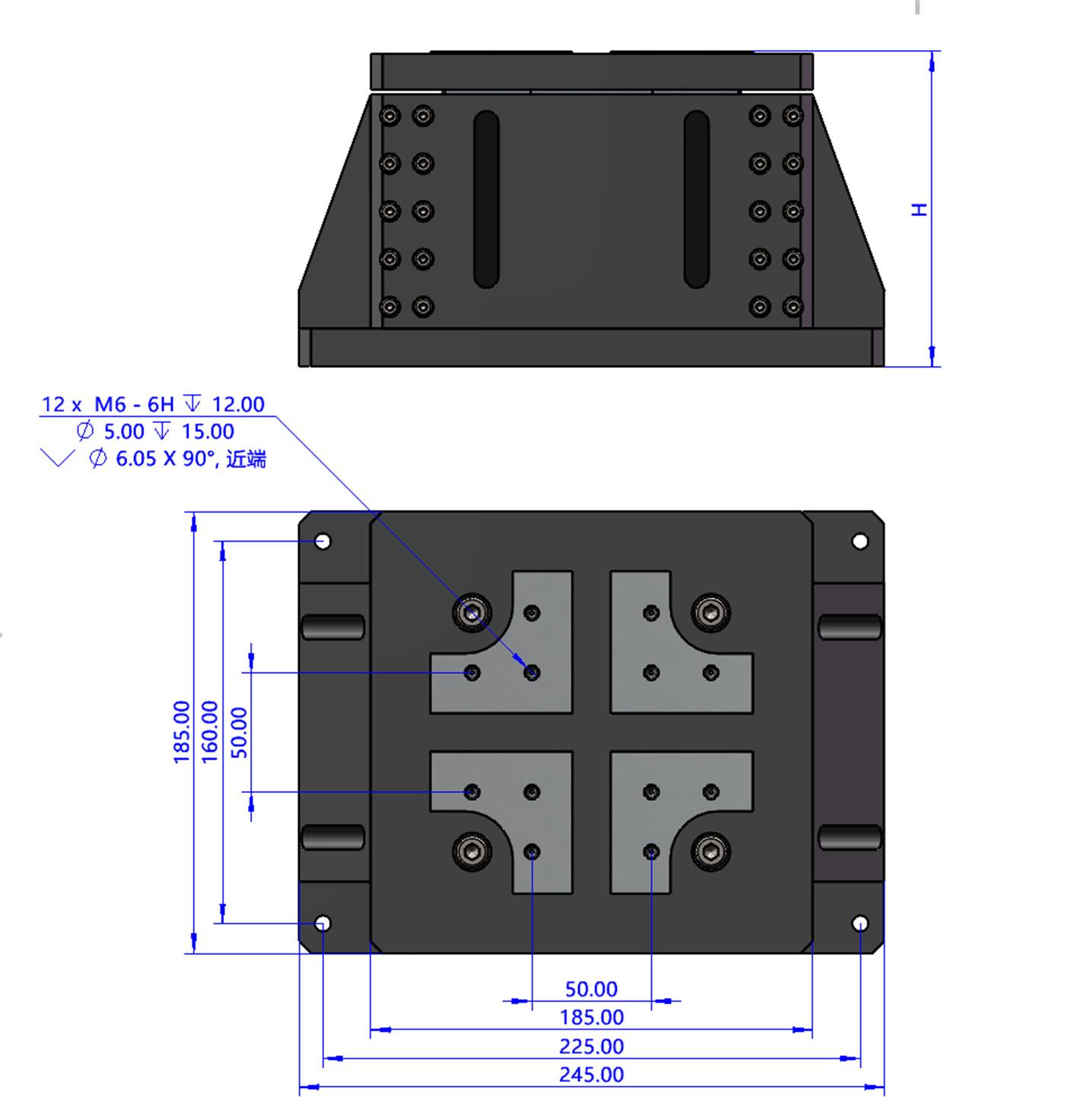
E-ABVT-Z Vertical axis air bearing stage
Low Profile, High Precision Vertical Translation Stage Platform
The E-ABVT-Z vertical voice motor stage platform provides high precision Z-axis motion with sub-micron resolution, for loads up to 6 kg. Unlike vertically mounted linear stages, the high-stiffness platform concept allows for a much lower profile with 360-degree access to its payload while avoiding moment loads that can affect bearing performance and/or straightness of motion.

Elevation Stage with Excellent Straightness and Flatness of Motion The vertical stage platform design provides excellent straightness and flatness, with better pitch and yaw performance compared to vertically mounted linear positioning stages, where the cantilevered load can cause deflections in the supporting linear bearings.
High Resolution Linear Motion with voice Servo MotorsE-ABVT-Z is internally driven by a voice coil motor, equipped with an air-floating transfer rail (cross ball guide rails can also be used), and uses a high-resolution grating to close the loop, and is equipped with a high-performance driver to ensure the minimum displacement and repeatability of the positioning stage. achieve great performance.
Computer Control, Software, Programming
A selection of single-axis and multi-axis, high-performance motion controllers are available to operate the E-ABVT-Z series of Z-stages. Precision-stage provides drivers and software for commissioning and easy operation as well as program examples in popular programming languages. See motion and positioning controller recommendations in the technical specifications table for more information on matching control electronics.

Multi-Axis Stage Combinations
● E-ABVT-Z vertical positioning stages can be combined with motorized long-travel linear stages and integrated motorized XY tables to form multi-axis precision motion systems.
● Other Elevation Stage Options – Longer Travel / Higher Resolution
● Highly Accurate Position Measuring with Incremental Linear Encoder
● Noncontact optical encoders measure the position directly at the moving platform with the greatest accuracy.
● Nonlinearity, mechanical play or elastic deformation have no influence on the measurement.
● Application Fields for E-ABVT-Z Vertical Lift Stages
● Based on the low profile design and high-performance motion capabilities, the UPL vertical lift stage family is a great choice for applications that require very straight and smooth vertical motion with high resolution and repeatability, such as optical inspection, surface metrology, semiconductor wafer inspection, high precision device alignment, and quality control processes of highly accurate mechanical, electrical and optical components.
| Specification | ABVT-Z20 | -Z38 |
| Motor type | VOICE COIL MOTOR | |
| Opticval Encode resolution | sincos 4.88nm(Other higher resolutions are optional) | |
| Motor thrust | Continuous 27N/ Peak 119N | Continuous 45N/peak 192N |
| Min step-size[nm] | 10nm(with nanopwm or linear driver) | |
| Travel [mm] | 20 | 38 |
| Repeatability Accuracy [um] | ±50nm | |
| Accuracy [um] | ±150nm | |
| Flatness [um] | 1um | 1.5um |
| Straightness [um] | 0.5um | 0.7um |
| Max Speed [mm/s] | 50mm/s | |
| Max load capacity [kg] | 6kg(Pneumatic constant force spring balance) | |
1) What are the shipping ways?
A: We will ship the goods according to customer’s demand.
Normally by DHL, UPS, Fedex, TNT.
For bulk order,we also can ship by air,by sea.
2) How about your company Experience?
A: As a dynamic team, through our more than 12years of experience in this market, we are still continuing to research and learn more knowledge from customers, hoping that we can become the largest and professional supplier in China in this market Business one.
3) How about your products Quality?
A: We have a strict quality control system.
All products ordered from our factory are inspected by a professional quality control team.
-

E-NZH-630 ,high-precision 6-degree-of-freedom (...
-

Quodropod Parallel Kinematic stage Four-point s...
-

E-NZH-610 ,high-precision 6-degree-of-freedom (...
-

Linear motor performance testing and Measureme...
-

HEX-S5.10.60-XXX Series parallel motion platfor...
-

HEX-S6.50.200 6-Axis Hexapod Tri-pod structer P...